최신연구
[최승문 교수] VR 컨트롤러와 가상 환경의 물체의 형상이 일치하도록 하는 시-촉각 변환 형상인지 모델
[연구의 필요성]
현재 상용 VR 컨트롤러는 가상환경의 맥락과는 상관없이 항상 같은 물리적인 형태를 가지고 있어, 사용자의 몰입감있는 환경을 만들기 어렵다 (예를 들어, 가상의 칼을 이용하여 상호작용을 하지만, 컨트롤러의 크기는 작은 막대기 형태를 지니고 있다). 이를 개선하기 위해 형상 변형 컨트롤러가 많이 개발되고 있으나, 현재의 기술은 물리적인 형태 변형에만 초점을 맞출 뿐 실제 사용자가 인지하는 컨트롤러의 형태에 대한 연구는 부족하다. 이에 본 연구에서는 사용자가 다양한 무게 및 크기의 컨트롤러를 가지고 가상환경을 상호작용할 때 시-촉각 형태가 일치하는 몰입감있는 상황을 위한 형상인지 모델을 제시한다.
[포스텍이 가진 고유의 기술]
본 연구에서는 역동적 접촉 (Dynamic Touch)라는 개념을 기반으로 손에 쥔 VR 컨트롤러의 형태와 가상 환경에서 표현되는 가상 물체와의 시각-촉각 상황이 일치하는 환경 구현을 위한 형상인지 모델을 개발하였다. 역동적 접촉이란 물체를 들기, 흔들기, 비꼬기 등을 통한 접촉 방식을 말하며, 이 접촉이 일어날 때 물체의 질량 분포도를 기반으로 형상 인지를 할 수 있다. 본 연구에서는 실제 물체의 관성 모멘트 (Moment of Inertia; MOI)가 물체의 길이에, 관성 곱 (Product of Inertia; POI)가 물체의 넓이 비대칭성에 영향을 주는 것을 도출하였고 이를 기반으로 시각-촉각 형상을 일치시킬 수 있는 형상인지 모델을 개발하고 가상환경에서의 검증을 진행하였다. 시각-촉각 형태의 변환을 이끌어내는 인지 모델은 포스텍만이 가진 고유 기술이라고 할 수 있다.
[연구의 의미]
본 연구에서 제시한 형상 인지 모델을 사용하면, 1) 형상 변형 컨트롤러의 형태를 변환할 때, 목표하고자 하는 가상 물체의 형태에 맞춰서 컨트롤러의 상태를 결정지을 수 있다. 2) 컨트롤러의 형태가 제한적이다면 이 형태와 가장 일치하는 가상 물체의 크기, 무게, 및 형태를 제시할 수 있다. 결과적으로 본 방법을 이용하여 더욱 몰입감있는 VR 경험을 제시할 수 있다.
[연구결과의 진행 상태 및 향후 계획]
이번 연구는 컨트롤러의 1차원 길이 및 2차원 넓이 부분에 대해서만 고려하여 형상 인지 모델을 개발하였다. 후속 연구로 추가적인 질량 분포에 관한 변수를 이용하여 3차원 부피에 대한 형상 인지 모델을 개발하여 더욱 범용적으로 이용할 수 있는 모델을 만들고자 한다.
[성과와 관련된 실적]
국제 학술대회 논문: Chaeyong Park, Jeongwoo Kim, and Seungmoon Choi. Visuo-haptic Crossmodal Shape Perception Model for Shape-Changing Handheld Controllers Bridged by Inertial Tensor. In Proceedings of the ACM conference on Human Factors in Computing Systems (Hamburg, Germany, April 23-28, 2023). CHI ’23. ACM.
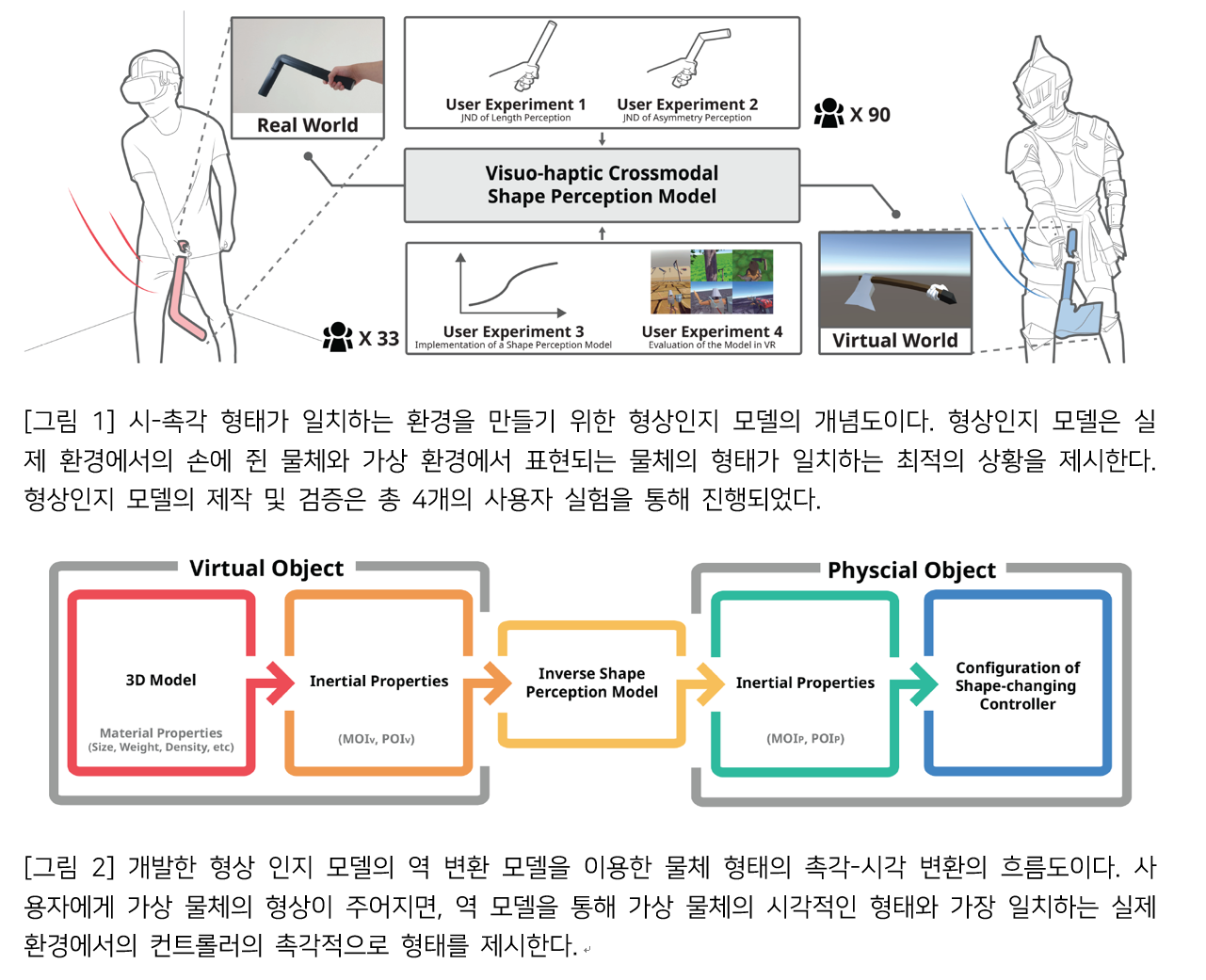
[성과와 관련된 이미지]